管路廣泛使用在民生及多種產業,例如石油及天然氣業、半導體及面板業等。管路的妥善與否攸關安全及成本,因此需定期檢測。目前大部分管內機器人為剛性結構,由輪子、履帶或腳型機構驅動,以及連桿、齒輪等金屬構件組成,通常需搭配回授控制,其優點為可精準定位,缺點則為適應性較差。相對而言,軟性爬管機器人有機會在不需精密回授控制下達到管內移動、檢測的目的,且具有較高的適應性,如管內表面破損或腐蝕而有缺陷時,或是有雜質堆積時導致凹凸不平,均不影響其作動。現有軟性爬管機器人大多只有單一移動方式(locomotion),如需在爬行及跳躍間轉換,則必須更換零件,有所不便。本論文開發一種新型的軟性爬管機器人,可在不更換零件的情況下,透過兩個馬達不同的驅動順序,即可在移動間依需求轉換前爬、後爬、前跳等不同移動方式。上述不同的移動方式係透過包覆機器人外側六片彈性薄片與管壁接觸的不同挫屈型態來達到。彈性薄片是3D列印而成的熱塑性聚胺脂(Thermoplastic polyurethane, TPU),製作簡易可迅速測試不同設計的性能。相對而言,傳統的翻模法需先製作模具再澆注固化,過程耗時且設計限制較多。本研究開發的軟性機器人可透過前跳達到快速移動、透過前爬後爬達到通過彎管等不同需求。本論文亦探討薄片設計、馬達收線、放線等參數對跳躍距離及爬行速度的影響。(機械系莊嘉揚教授提供)
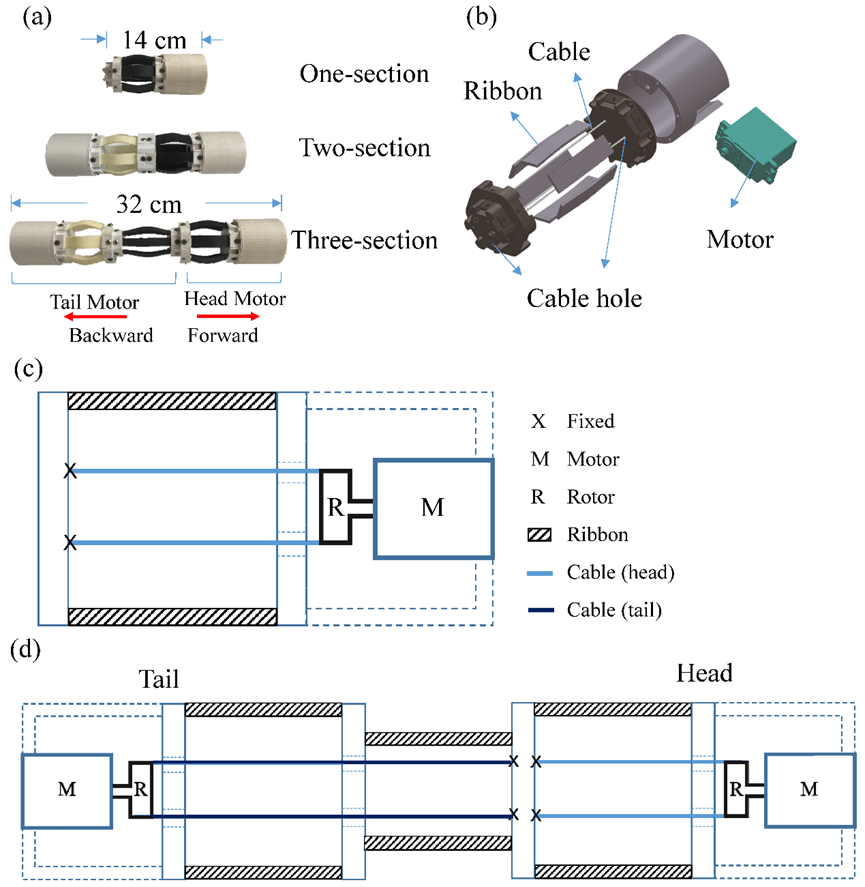
圖一 (a)三種原型機照片:單節、雙節、三節。三節機器人由兩個馬達驅動。(b)單節機器人CAD模型。(c)單節機器人的截面圖。(d)三節機器人的截面圖。薄片長度6 cm。
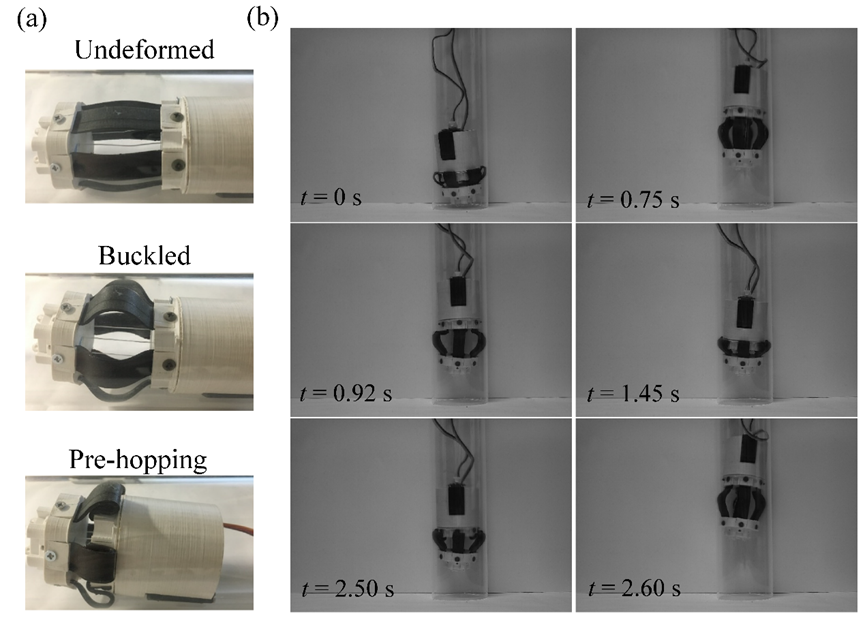
圖二 (a)單節機器人的三種狀態:未變形、挫屈、跳躍前。(b)單節機器人垂直上跳時的高速攝影照片。跳躍前狀態在時間 t = 0秒和1. 45秒。薄片長度6 cm。
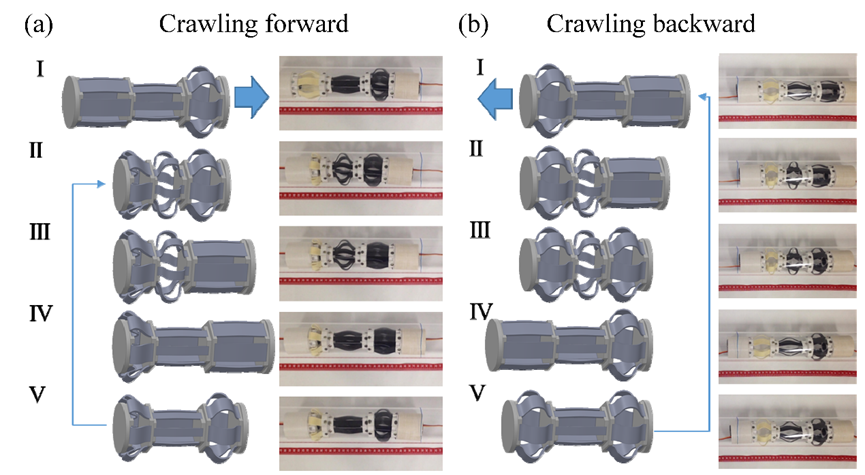
圖三 三節機器人前爬及後爬的驅動順序及對應的樣態:(a)前爬,(b)後爬。薄片長度6 cm。