機械手臂的應用彈性使其被廣泛應用到不同的製造與生產線上,例如雷射切割、焊接與塗膠等。在這些應用中,軌跡追蹤的絕對精度直接影響了加工件的品質。機械手臂的追蹤性能常受到運動學校正誤差、傳動誤差、與關節驅動器動態特性的影響。這些誤差機制的建模與識別通常需要花費大量時間和實驗成本取得。利用工業量產工序重複的特性,本研究開發了一個雙迴圈的巢狀式學習結構如圖一,分別針對驅動器動態特性與低頻率的校正與柔性偏移作出軌跡補償。整個演算法僅需使用到運動學的公稱設計尺寸,不須修改任何既有的控制架構,並且具有快速收斂的特性。(機械系李宇修教授提供)
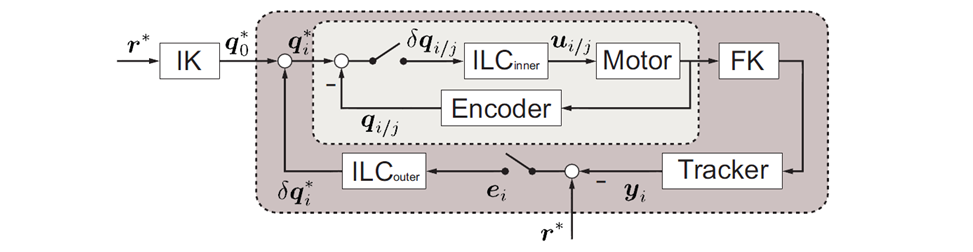
圖一、用於機械手臂軌跡追蹤、具雙迴圈的巢狀式學習結構。其中 i 為外迴圈指標, j 內迴圈指標。內迴圈迭代學習使用關節角度誤差 δqi/j 生成補償命令 ui/j ;而外迴圈迭代學習使用手臂末端以雷射追蹤儀量測的端點誤差 ei 生成關節命令修正 δqi﹡。
相較於既有的做法,本研究的利用機械手臂關節常建置高減速比的齒輪傳動機構而對剛體動力學不敏感的特性,以簡單的斜波指令實驗直接獲取閉迴路下驅動器的動態特性生成學習函數進行補償。為避免激發角度編碼器無法量測的柔性模態,兼且在學習過程中以訊號處理的方式有效調節振動的產生。完整的演算法使用工研院的六軸工業型機器手臂驗證如圖二。
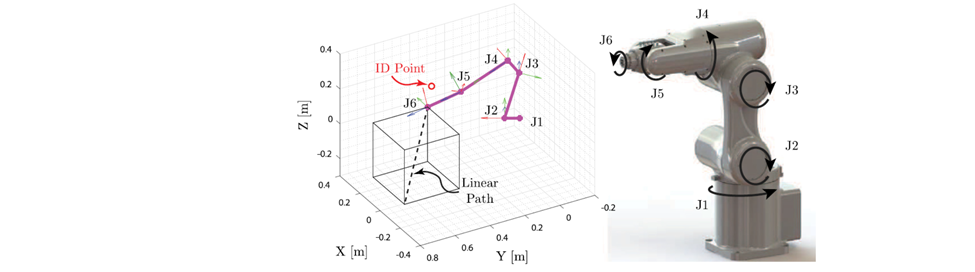
圖二、左:機器人骨架圖(紫色粗實線)與指定追蹤的空間中直線軌跡(黑色虛線);右:工研院串聯式六軸工業型機器手臂AR607。
圖三為不同迭代次數下使用雷射量測沿著直線軌跡的誤差時間圖與功率譜密度(Power Spectral Density, PSD),時間圖可看出內迴圈有效地補償動態追蹤誤差,外回圈則將準靜態的偏移進一步修正,且過程中端點的振動都未有被激發。整體而言,本來的最大誤差從10 mm被降低到0.2 mm下降了50倍之多,因此可以達成精密軌跡追蹤的目的。

圖三、左:不同迭代次數下使用雷射量測沿著直線軌跡的誤差時間圖;右:端點追蹤誤差的譜密度,其中 i/j 代表第 i 次外迴圈時第 j 次內迴圈的學習結果。