離岸風電設備國產化為政府既定之發展目標,離岸風場之施工、運維船舶,因波浪運動使得水面或水下施工位置變動,而造成定位不易及施工人員之危險,無論施工船或維修船都須建立具調平補償之液壓多軸運動調平控制系統,補償波浪造成之工作點位置變動,提升離岸風場人員及施工之準確性及安全性。
本研究旨在發展創新之多軸液壓調平控制系統應用於離岸風場之施工、運維船舶,針對國內離岸風場之台灣海峽之海況,以多軸封閉式機構運動平台為基礎,設計適合國內之多軸液壓調平控制系統,發展多軸液壓調平控制系統之運動學(kinematics)、動力學(dynamics)、控制系統以及建立實驗原型系統。實驗原型機組發展多軸之液壓調平控制系統實驗原型機組,進行主動式調平控制模擬及實驗。故發展多軸封閉式機構運動平台之正、逆向運動學、軌跡規劃,設計智慧型控制策略,發展控制器,以適合離岸風機進系統之惡劣環境。動態模擬以分析軟體ADAMS進行機構動態建模,結合以MATLAB針對液壓系統及控制系統建模,進行全系統動態模擬分析。最終建立多軸液壓調平控制系統全尺寸實驗原型機組,以hardware-in-the-loop方式,於首先於實驗室實際實驗驗證其補償控制性能,做為未來於實海域船舶實際測試之基礎,以期協助我國產業界建立國產化技術之能力。(江茂雄主任提供 mhchiang@ntu.edu.tw)
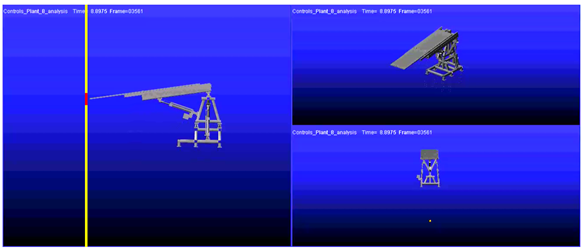
圖一、結合ADAMS機構動態建模與MATLAB液壓系統及控制系統建模,進行多軟體co-simulation,實現全系統閉迴路控制動態模擬分析
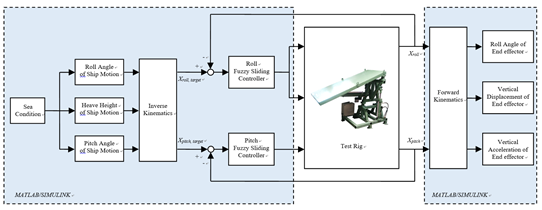
圖二、以hardware-in-the-loop方式建立多軸液壓調平控制系統全尺寸實驗原型機組及全系統架構
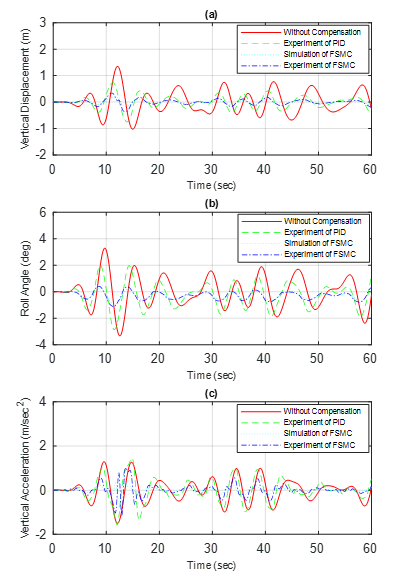
圖三、運動補償控制實驗測試結果比較,(a)端點垂向位移響應、(b)端點橫搖角度響應、(c)端點垂向加速度響應